
Controlador Motor Driver L298n Puente H Paso a Paso DC
inteligente Electrónica L298n DC Motor Driver Placa de Desarrollo de Expansión Shield para Arduino DIY Robot Coche Mega UNO

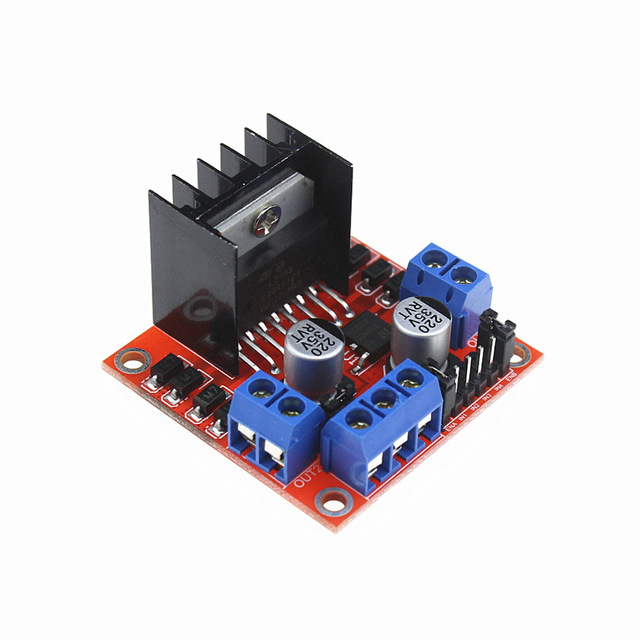
el Protector Del Motor se basa en el L298which es un doble controlador de puente completo diseñado para manejar cargas inductivas como relés, solenoides, DC y motores paso a paso. te permite conducir dos motores de CORRIENTE CONTINUA con tu tabla, el control de la velocidad y la dirección de cada uno de forma independiente. también se puede medir el consumo de corriente del motor de cada motor, entre otras características. el escudo está TinkerKit compatible, lo que significa que usted puede crear rápidamente proyectos conectando módulos TinkerKit a la junta.

| Voltaje De funcionamiento | 5 V a 12 V |
| controlador de Motor |
L298N,unidades de 2 motores de CORRIENTE CONTINUA o motor paso a paso 1 |
| corriente máxima | 2A por canal o 4A max (con fuente de alimentación externa) |
| detección de corriente | 1.65 V/A |
| funcionamiento libre de parada y función de freno |

el Arduino Motor Shield debe ser alimentado sólo por una fuente de alimentación externa. porque el L298IC montado en el escudo tiene dos conexiones de alimentación separados, uno para la lógica y uno para el conductor de alimentación del motor. la corriente del motor requerido a menudo excede la máxima valoración actual USB.
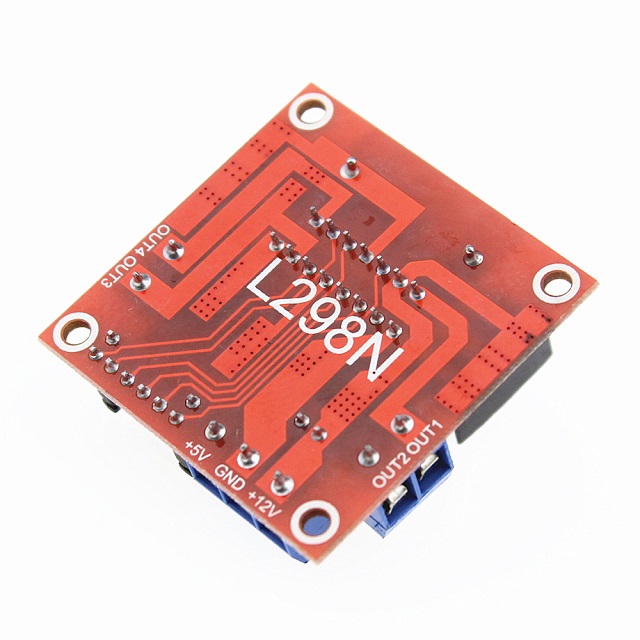
externa (no USB) de potencia puede venir de un adaptador de CA a CC (pared-verruga) o la batería. el adaptador se puede conectar al conectar un 2.1mm de centro-positivo en el Arduino junta power jack en el que el protector del motor se monta o mediante la conexión de la cables que dirigir la fuente de alimentación para el Vin y GND terminales de tornillo, teniendo cuidado de respetar las polaridades.
para evitar posibles daños a la placa Arduino en la que el escudo se monta, les recomendamos el uso de una fuente de alimentación externa que proporciona una tensión de entre 7 y 12 V. si su motor requiere más de 9 V recomendamos que separe el poder líneas de la pantalla y la placa Arduino en la que el escudo se monta. esto es posible mediante la reducción de la " Vin Connect " puente colocado en la parte posterior del escudo. el límite absoluto para el Vin en los terminales de tornillo es 18 V.
los pines de alimentación son los siguientes:
el escudo puede proporcionar 2 amperios por canal, para un total de 4 amperios máximo.

este escudo tiene dos canales separados, llama A y B, que cada uso 4 de los pines de Arduino para o de sentido del motor. en total hay 8 pines en el uso de este escudo. usted puede utilizar cada canal por separado para conducir dos motores de CORRIENTE CONTINUA o combinarlos para conducir un motor paso a paso bipolar.
pins del escudo, dividido por el canal se muestran en la siguiente tabla:
| función | pins por Canal. un | pins por Canal. B |
| dirección | D12 | D13 |
| PWM | D3 | D11 |
| freno | D9 | D8 |
| Detección de corriente | A0 | A1 |
si usted no necesita el Freno y la Detección de Corriente y también necesita más pines para su aplicación puede deshabilitar esta cuenta mediante la reducción de los respectivos puentes en la parte posterior del escudo.
las tomas adicionales en el escudo se describe de la siguiente manera:

cepillado motor de CORRIENTE CONTINUA. usted puede manejar dos motores DC Cepillado mediante la conexión de dos cables de cada uno en el (+) y (-) terminales de tornillo para cada canal A y B. de esta manera usted puede controlar su dirección mediante el establecimiento de ALTA o BAJA de DIR A y B pins DIR, usted puede controlar la velocidad mediante la variación de la PWM A y ciclo de trabajo PWM B valores. el Freno A y B de Freno pins, si en lo ALTO, serán efectivamente freno de los motores de CORRIENTE CONTINUA en lugar de dejar que ralentizan cortando la energía. usted puede medir la corriente pasa a través del motor de corriente CONTINUA LEYENDO los pins SNS0 y SNS1. en cada canal será una tensión proporcional a la corriente medida, que se puede leer como una entrada analógica normal, a través de la analogRead función () en la entrada analógica A0 y A1 para su comodidad está calibrado para ser 3.3 V cuando el canal está entregando su corriente máxima posible, que es 2A.

la longitud y la anchura máxima del Motor Shield PCB son respectivamente de 2.7 y 2.1 pulgadas. cuatro orificios de los tornillos que la junta pudiera estar unido a una superficie o un caso. tenga en cuenta que la distancia entre los pines digitales 7 y 8 es de 160 milésimas de pulgada (0.16 "), no un múltiplo de los 100 mil espaciamiento de los otros pines.

1 UNIDS L298n DC Motor Driver
Referencias específicas
No customer reviews for the moment.